STM32F103. Начало работы в Keil
Статья носит характер небольшого мануала о том, как начать программировать микроконтроллеры STMicroelectroniks на примере популярного и простого в освоении семейства stm32f1
Статья ориентирована на одного моего товарища, вполне перспективного программиста, надеюсь она ему поможет. Если вы не он, закройте страницу тоже можете читать.
Основные вопросы этой заметки:
- как начать разрабатывать ПО для
stm32вKeil; - что для этого необходимо.
Начать необходимо со второго вопроса. Необходимый минимум это среда программирования (Keil), программатор и отладочная плата. Можно конечно и в симуляторе запускать программу, но это не так инетресно, так что плата и программатор нужны. Где брать писать не буду, не моя это забота.
Для начала необходимо установить keil, его можно взять на официальном сайте, на данный момент последняя версия 5.26, если у вас 5.25 не отчаивайтеся, там различий не много, есть весьма полезные функции, но они вам не нужны.
Я сразу же после установки на новую машину произвожу настройку среды программирования:
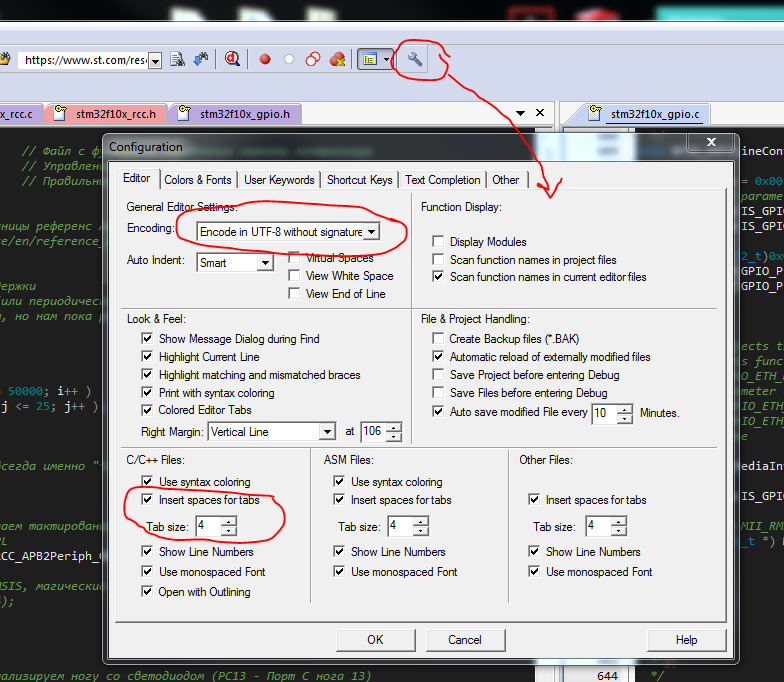
Вот так они выглядят. Теперь по пунктам, что и где настроено.
- Изменена кодировка файлов на юникод, так у вас гарантированно будут отображаться русские символы в комментариях
- Настраиваю замену табуляции на 4 пробела (это довольно холиварная тема, но я любю так), с такими настройками код гарантированно одинаково будет выглядить в любом редакторе.
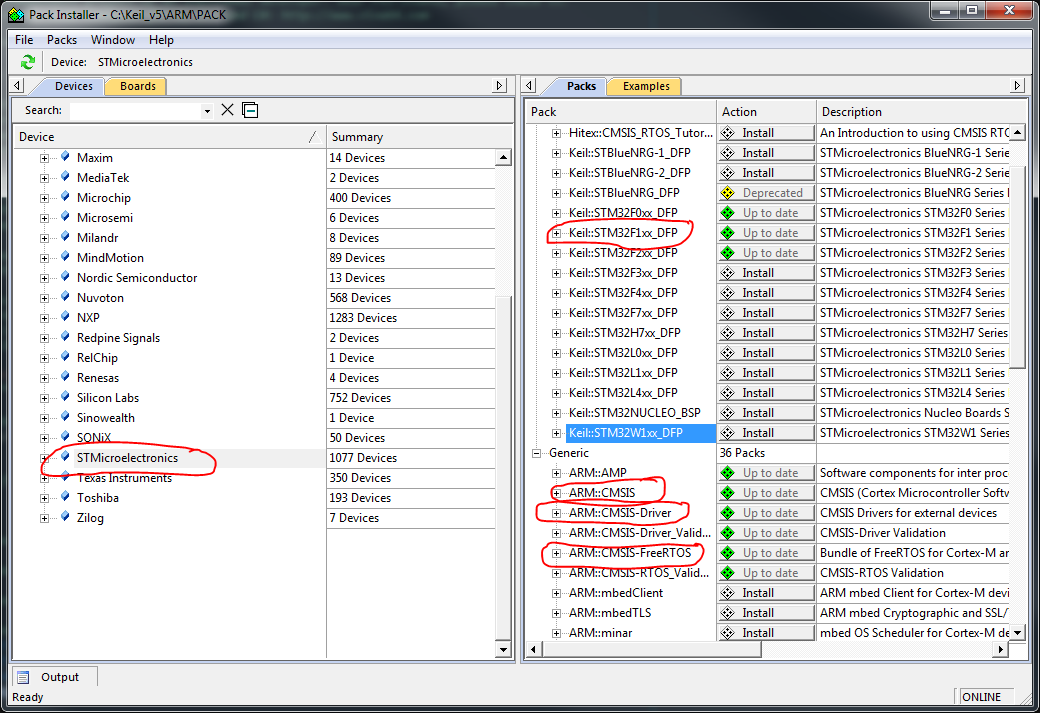
Теперь установим паки (различные библиотеки) необходимые для разработки под наш чип. Минимум установлен на картинке. FreeRTOS на самом деле не обязательно устанавливать, но пусть будет, ведь после игр с различной переферией будет пытаться оседлать её.
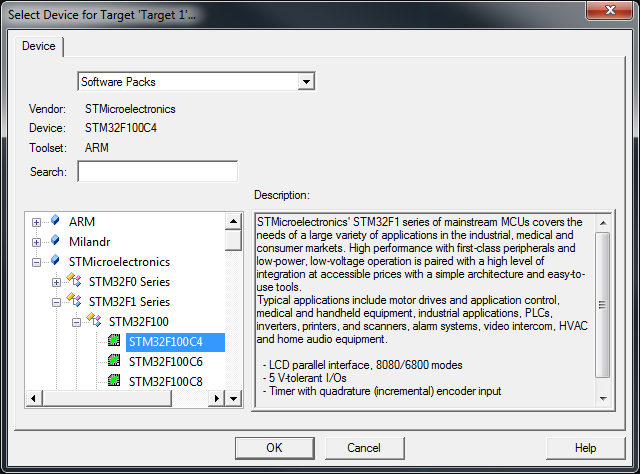
И так, все настройки сделаны, всё установлено, пробудем создать новый проект. Делается это через меню Project->New μVision Project...
Сразу после нажатия откроется окно с предложением выбрать используемый чип, его название можно посмотреть на корпусе =)
Следующим этапом нам будет предложено выбрать необходимые в нашей работе паки. Отмечаем всё как на картинке.
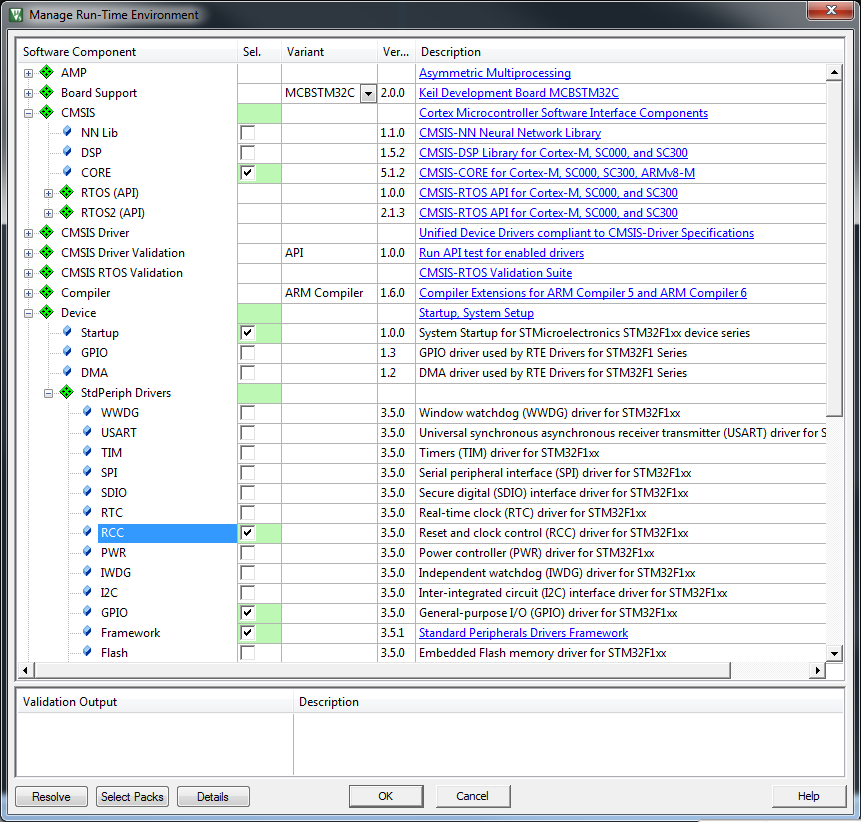
CMSIS(Cortex Microcontroller Software Interface Standard);Startup- это ассемблерный файл для запуска нашей программы, с содержимым можно будет ознакомиться самостоятельно;STDPeriph- Библиотека переферийных устройств:Fraemwork- оснойной файл, подлючающий бибилотеку;GPIO- для управления портами ввода-вывода;RCC- для управления тактированием.
Всё выбрано, значить пожно приступать к следующему шагу. Настройка проекта. открывается через меню Project->Option for Target...
Рассмотрим наиболее интересные и необходимые вкладки.
Здесь можно выбрать версию компилятора, для простоты будем использовать версию 5.

Вкладка для настройки компилятора. Здесь можно включить оптимизацию, выбрать уровень предупреждений, установить список инклудов и предопределенных макросов, и многое другое.
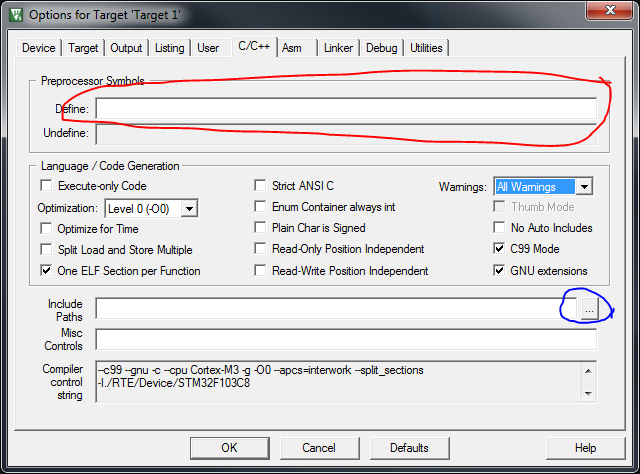
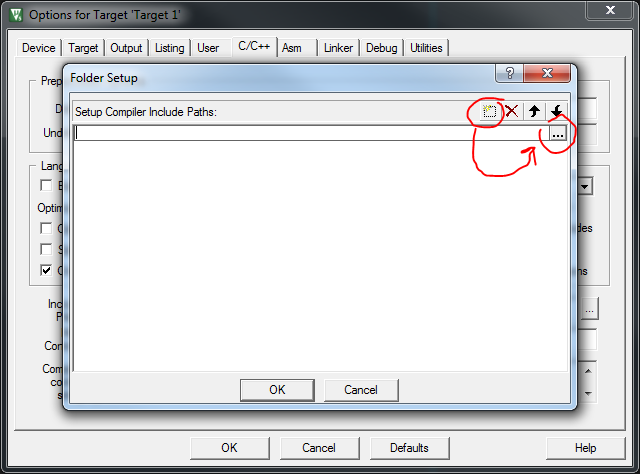
Нажатие на кнопку обведенную синим открывает диалоговое окно для добавления путей к используемым зголовочным файлам.
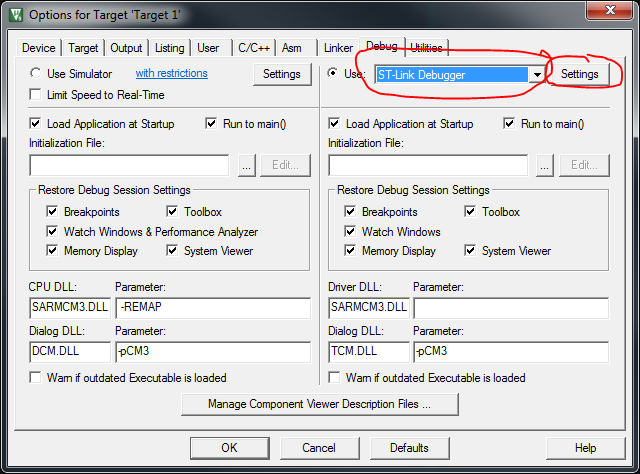
Следующая вкладка для настройки отладки, здесь можно выбрать используемый программатор и настроить его.
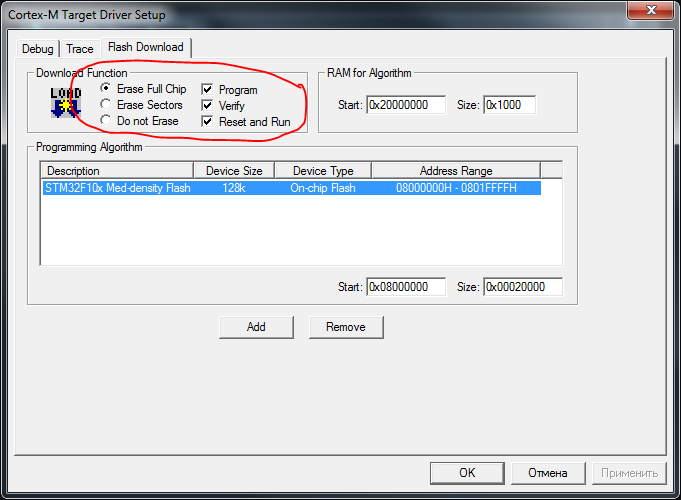
Настройки программатора. При загрузке прошивки будем стирать весь чип, программировать, верифицировать и запускать программу на исполнение.
Ну вот с настройка мы разобрались.
Приступим к написанию кода.
Программа для микроконтроллера выглядит в виде бесконечного цикла. Что бы это понять предлагаю ознакомиться с кодом:
/* Точка входа в программу */
int main( void )
{
/*
Здесь производится инициализация основных узлов программы и микроконтроллера
*/
while( 1 )
{
/*
Вечный цикл необходим для работы, иначе программа останомиться
Сюда обычно помещают код который выполняется постоянно
или оставляют цикл пустым если работают на прерываниях, можно совмещать.
*/
}
}Что нужно сделать чтоб ы помигать светодиодом?
- Включить тактирование порта к которому подключен светодиод;
- Настроить порт на выход;
- в вечном цикле переключать вывод с небольшой задержкой то в
0, то в1.
Вот и наш учебный код:
#include "stm32f10x.h"
#include "stm32f10x_gpio.h" // Файл с функциями управления ножками контроллера
#include "stm32f10x_rcc.h" // Управление тактированием
#include <stdint.h> // Правильные типы данных, вместо всяких int, char и тому подобных
// Далее будут ссылки на страницы референс мануала, его можно сказать по ссылке:
// https://www.st.com/resource/en/reference_manual/CD00171190.pdf
// Примитивнейшая функция задержки
// Для орагнизации задержек (или периодических событий)
// обычно применяются таймеры, но нам пока рано, так что
// тупо мотаем такты
void Delay( void )
{
for( uint16_t i = 0; i <= 50000; i++ )
for( uint16_t j = 0; j <= 25; j++ );
}
// точка входа в программу, всегда именно "int main ( void )"
int main( void )
{
// ---------------- Включаем тактирование порта GPIOC
// 1. С использованием SPL
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC, ENABLE );
// 2. С использованием CMSIS, магические числа
// RCC->APB2ENR |= (1 << 4); // см 146 стр.
// ----------------
// ---------------- Инициализируем ногу со светодиодом (PC13 - Порт С нога 13)
// 1. С использованием SPL
GPIO_InitTypeDef PortC; // Структура с необходимыми полями
PortC.GPIO_Mode = GPIO_Mode_Out_PP; // Выход пуш-пул, см 164 стр.
PortC.GPIO_Speed = GPIO_Speed_10MHz; // По сути это ток который сможет обеспечить вывод
PortC.GPIO_Pin = GPIO_Pin_13; // Номер ноги
GPIO_Init(GPIOC, &PortC); // Применяем настройки
// 2. С использованием CMSIS
// GPIOC->CRH |= (0x00 << 22) | (0x01 << 20); // см 172 стр.
// ----------------
// Основной цикл, программа ВСЕГДА должна зацикливаться!!!
// Не всегда наполнен чем-то вразумительным, иногда может быть пустым,
// например когда вся логика реализована в прерываниях.
while( 1 )
{
// ---------------- Устанавливае ногу со светодиодом (PC13 - Порт С нога 13)
// 1. С использованием SPL
GPIO_WriteBit(GPIOC, GPIO_Pin_13, Bit_SET);
// 2. С использованием CMSIS и ODR регистра, см 173 стр.
// GPIOC->ODR |= (1 << 13);
// 3. C использованием CMSIS и BSRR регистра, см 173 стр.
// GPIOC->BSRR = (1 << 13);
// ----------------
Delay();
// ---------------- Сбрасываем ногу со светодиодом (PC13 - Порт С нога 13)
// 1. С использованием SPL
GPIO_WriteBit(GPIOC, GPIO_Pin_13, Bit_RESET);
// 2. С использованием CMSIS и ODR регистра, см 173 стр.
// GPIOC->ODR &= ~(1 << 13);
// 3. С использованием CMSIS и BRR регистра , см 174 стр.
// GPIOC->BRR = (1 << 13);
// 4. С использованием CMSIS и BSRR регистра , см 173 стр.
// GPIOC->BSRR = (1 << 29);
// ----------------
Delay();
}
}
// В конце файла для Кейла обязательна пустая строка! Хз зачем, просто нужна.
Код мигалки специально реализован несколькими возможными способами, используя STDPeriph и без него (только CMSIS)
Проект с этим кодом можно скачать здесь. Но лучше научиться создавать проект с нуля.
Будут вопросы пишите в комментариях, я обычно быстро отвечаю.
Как всегда - Спасибо за внимание и хорошего кодинга! =)